Blob Tracking
The standard method of tracking the aircraft’s control positions as the pilot moves the controls for flight test instrumentation (FTI) purposes is to attach string potentiometers (string pots) to the control cables/rods. As the control cable/rod moves based on the pilot’s inputs a spring loaded thin steel wire is reeled in or out of the string pot. The mechanical movement of the reel changes the electrical resistance resulting in a change in voltage output which is then measured and recorded by the FTI system.
In some cases though it would be ideal if you could track the aircraft control positions without having to physically attach a wire to the control cable/rod. So I developed a system to use computer vision techniques to track a coloured blob that had been mounted on the inceptor by processing a recorded video.
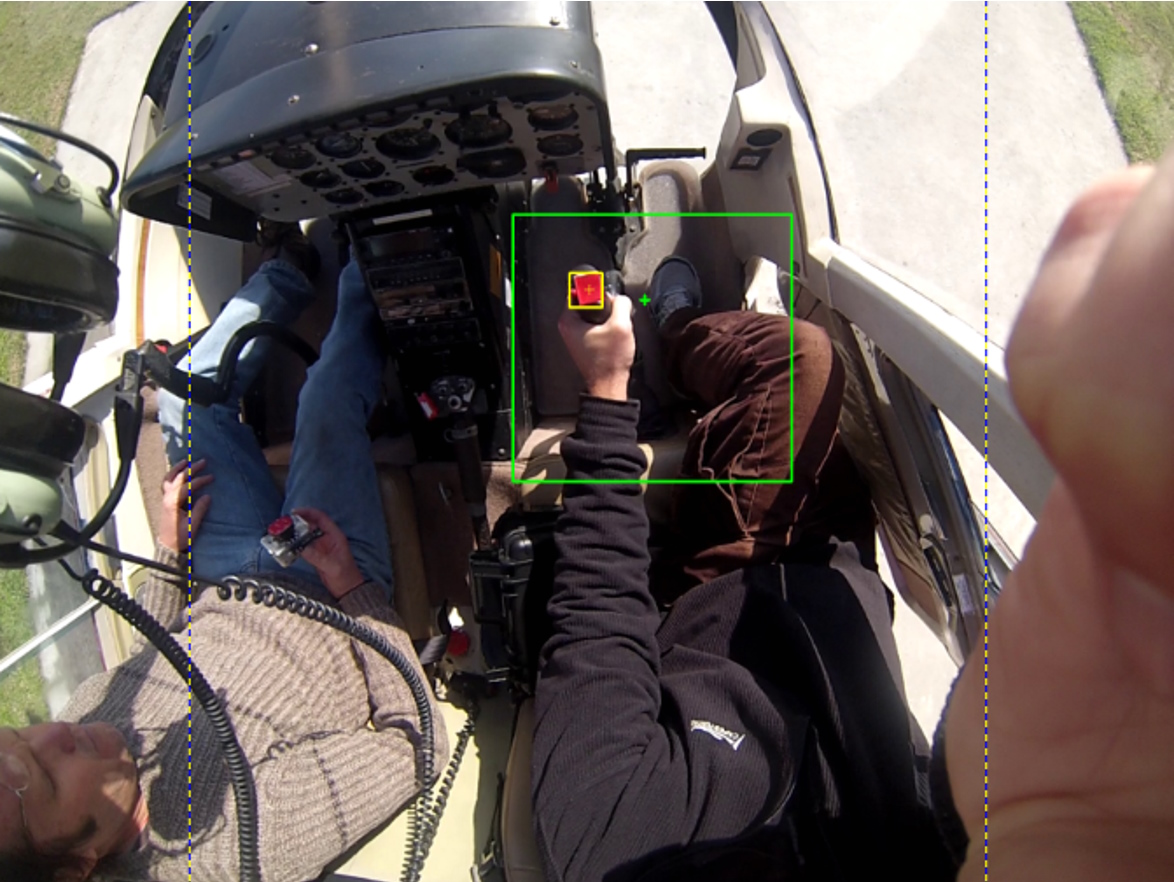
In the video frame below you can see that I’ve placed a red Coca-Cola cap on top of the helicopter’s cyclic, while I’m holding a GoPro camera above my head. I’ve gone through a calibration routine to mark the center position of the cyclic, the little green cross and I’ve performed a full deflection of the cyclic across it’s complete range of motion. Which results in the green box, depicting the maximum range of the cyclic. Lastly, the yellow rectangle shows the currently detected blob.
After flight the video is downloaded from the GoPro and the Blob Tracking application is used for calibration and processing of the video. In order to synchronize the FTI flight data that has been recorded with the control positions that are derived from processing the recorded video a time synchronization has to be performed. This is done by holding the FTI tablet in front of the camera before take-off for a couple of seconds while the FTI tablet application displays the current FTI timestamp. The video is then paused while it’s displaying the current FTI timestamp which is then entered into application which uses it to synchornoze the FTI time and the video time.
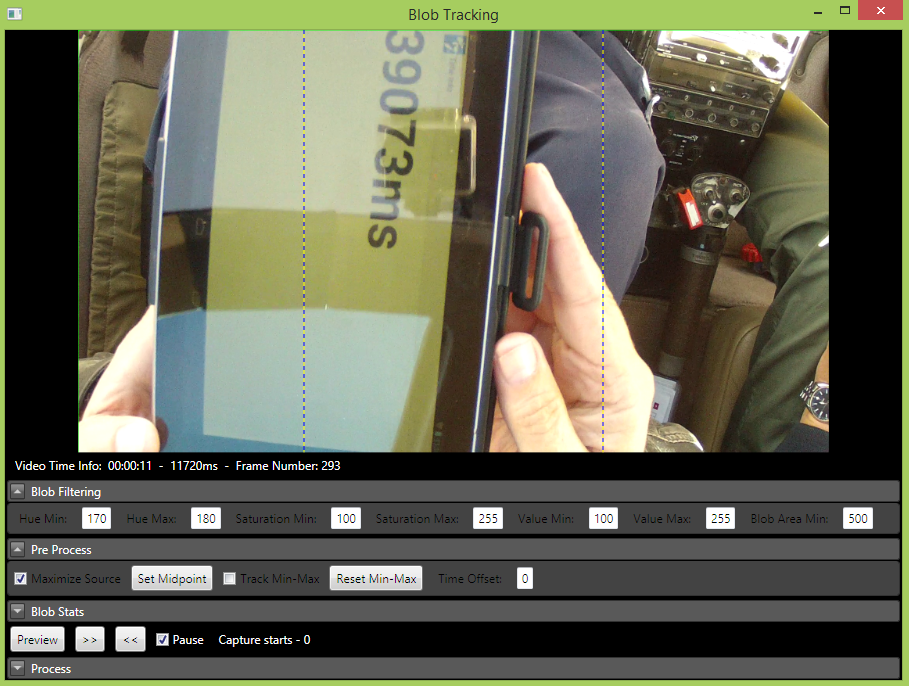
The Blob Tracking application is also used to set the video tracking parameters based on a min-max range of HSV values to ideally filter out only the target Coca-Cola bottle cap. A min-max size is also specified to help in filtering.
During video processing each video frame is converted into the HSV colour space and all the pixels are filtered based on the min-max HSV values that were specified to return a binary image consisting of white pixels that match. An OpenCV blob detector is then used to find blobs in the resulting binary image, within the maximum control range area in the video that was specified, and finally filtered based on the min-max blob size.
The screenshot below shows the final combined output combining the FTI data with the processed control positions that were recovered via the video recording. The video recording can also be displayed in sync with the FTI data within the FTI Flight Test Playback application.
